
卡尔曼滤波(Kalman filter)
测量值
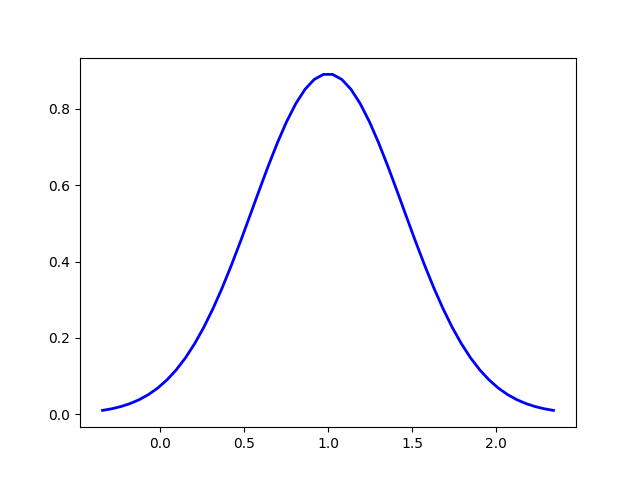
在讲卡尔曼滤波之前,我觉得必须强调的一件事就是对于测量值的理解。举个例子,比如我们测得桌子的长度是1米。我们知道误差肯定是存在的,所以这个桌子的长度可能实际上是1.01米或者0.99米。所以桌子的长度的测量值是1米,其实可以理解成桌子的长度是1米的概率最大。如果我们认为桌子的长度满足正态分布,我们也就会发现这个1米其实就是正态分布的均值,因为正态分布均值出现的概率是最高的。从概率分布函数上可以看出,桌子长度也可能是其他值,但是概率比1米要小。
思路
对于卡尔曼滤波的入门理解,我觉得还是先抛开矩阵会好一些。矩阵对于表示公式,参与计算等十分方便。但是如果你连整个算法的框架与思路都不了解,矩阵表示只会给你学习带来更大的难度。也许你记住了所有矩阵表示,但是你会发现,真正实际应用时,你会一脸懵,无从下手。边实践边学习边理解是高效的学习方法。
其实卡尔曼滤波的思路很简单,但于需要根据不同场景具体分析。它的思路其实就是根据多传感器有交集的特点,进行数据融合。什么是有交集呢?简单来讲就是你的一个信息,可以通过一个传感器直接读出,或者可以多个传感器运算得出。举个例子就是,对于你当前的位置,你可以通过GPS获得,你也可以通过你1小时前的位置结合你1小时走过的路程获得。前者就是卡尔曼滤波中的测量值,后者则是卡尔曼滤波中的预测值。
测量值我们是可以直接获得的,预测值我们是需要通过不同场景去分析的。
高斯融合分布
那么问题来了,我们有了这个预测值和测量值,这两个值我们要怎么应用,才能找到最优值呢。
还是同一个思路,这里的两个值,其实都是两个高斯分布,对应着两个均值和两个方差。测量的方差需要采样获得,预测的方差根据调试给出。因为自回归的原因,预测方差影响的是收敛速度。我们现在要把这两个高斯分布进行运算获得最优解。
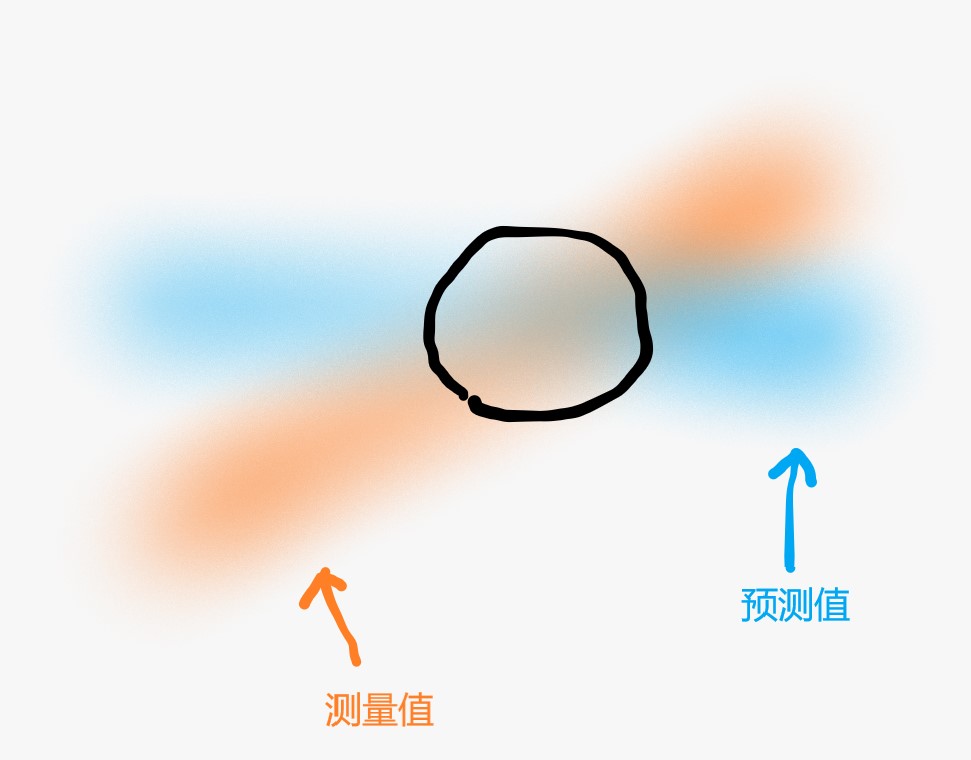
看下面这个图,橙色区域代表测量值,蓝色区域代表预测值。其实实际上整副图像都有测量值和预测值,只是没有颜色的区域的概率很小,有颜色的区域可以理解成3区域内。很明显看出,我们需要的最优解就是画圈的地方,也就是测量值和预测值的交集,我们需要将两个高斯分布融合,也就是相乘。
(高斯融合有详细的化简过程,嫌复杂的也可以直接看结果)
假设有两个高斯分布 测量值代表的高斯分布均值为,方差为,预测值代表的高斯分布均值为,方差为。
则两个高斯分布的概率分布如下
将两个概率分布相乘
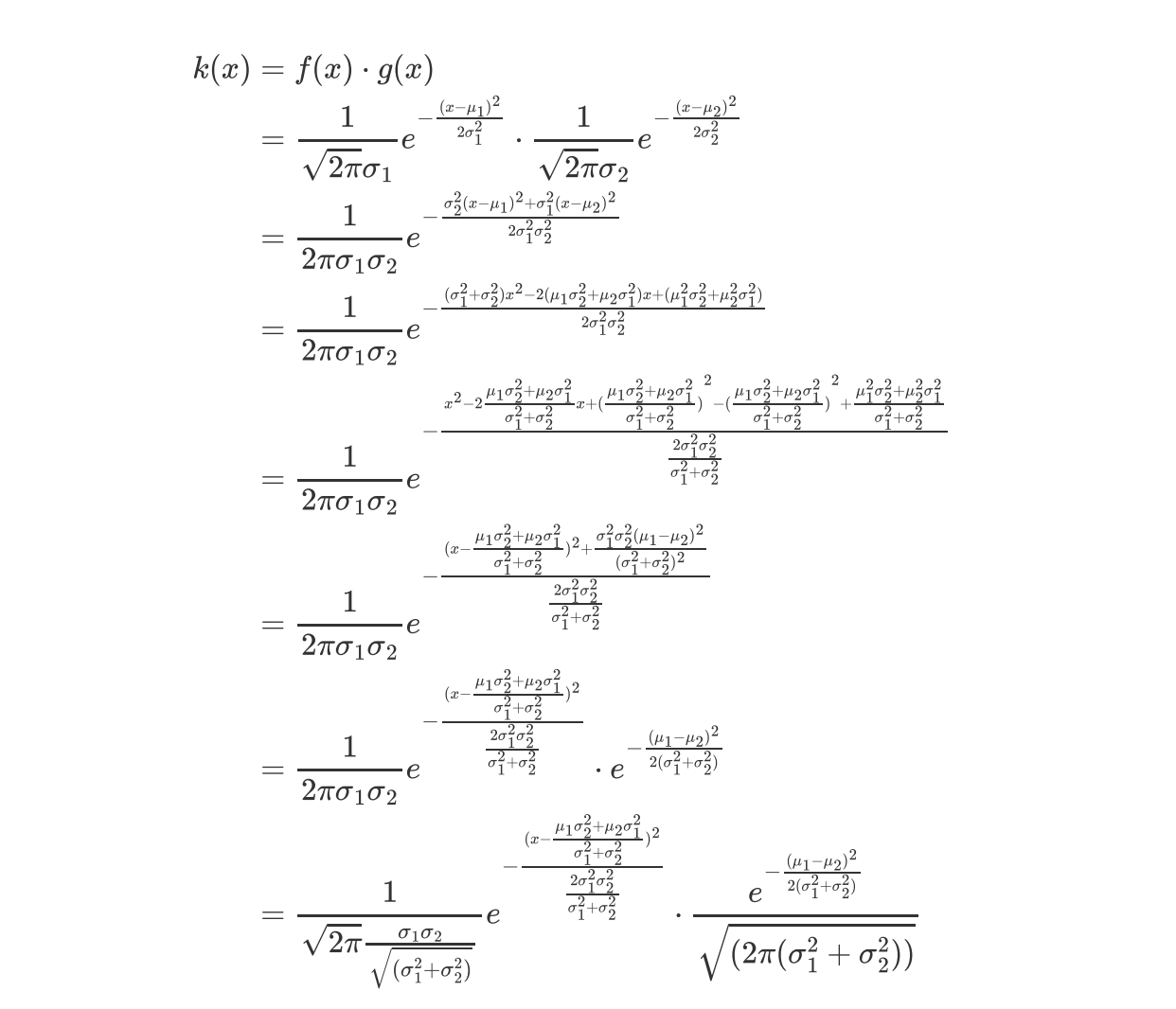
(当前只支持行间和行内公式渲染 所以就采用图片的方式)
所以结果是一个均值=,方差=的高斯分布乘以一个系数=。
将结果归一化,使得总概率为1,也就是去掉这个系数。
对于结果这个高斯分布,我们也是需要取概率最大的值,也就是均值。所以这里的也就是我们需要的最优解。
至于大家经常见到的卡尔曼增益其实就是。
最优解的另一种表示方式是。其实化简一下也就是上述的。
计算出最优值后,需要进行自回归,需要用到这里的。我们称为当前值距离最优值的方差。
其实如果完全带入公式的话,应该也不会出现卡尔曼增益。但是其实和的计算有重复的地方,个人觉得卡尔曼增益的意义就是更好地表示和计算,也可能是对其了解得还不够深。
具体例子
以雷达的一束数据为例,结合全场定位的数据,运用卡尔曼滤波获得当期最优解。
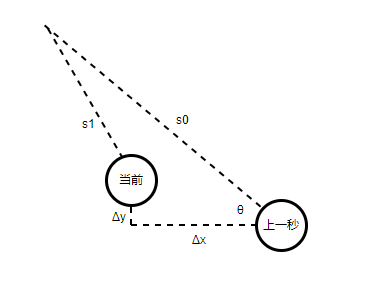
假设全场定位上一秒的数据为和,当前的数据为和,
则车子在这一秒运动的,。
假设雷达上一秒的数据为,则可以预测当前的雷达数据为。
而当期测得的雷达数据是,我们要把和进行融合。
我们先设定当前值距离最优值的方差为,这个值会随着自回归而收敛,不要为0即可。
假设我们给定预测方差为,则我们预测的雷达的方差。
假设我们测量方差为。我们现在相当于拥有两个正态分布
测量:均值,方差,预测:均值,方差。
ok,那我们要的最优解,然后自回归,。
当然这里用卡尔曼增益可以减少重复计算量,即
,,。
完成√
参考
reference:https://www.zhihu.com/question/23971601/answer/770830003
reference:https://blog.csdn.net/u010720661/article/details/63253509
reference:https://blog.csdn.net/Ronnie_Hu/article/details/111378283