
二维网格A* 算法
记录一下二维网格A*算法实现的知识以及流程
预备知识
A*算法选用原则,选用综合优先级值较小的节点
其中
表示从上一个父节点移动到指定点的移动代价,比如可以设直走为10,斜走为14,或者根据实际地形确定
表示从指定点到终点的估算成本,它是一个猜测,所以计算时不考虑中间障碍物
也叫做A*算法中的启发函数
常见有曼哈顿距离,对角距离,欧几里得距离
分别对应横竖走,横竖斜走以及任意方向走
设当前位置为,目标位置为,走一步的估算成本为D,则计算公式为
曼哈顿: ,
对角:
欧几里得:
步骤
这里我把步骤列出来,里面的一些细节后文补充
准备一个open_list和close_list,open_list是待遍历的节点,close_list是已遍历的节点
设定一个起点和终点,每一个网格都要记录父节点,,,。
流程:
将起点加入open_list
循环:
遍历open_list,查找f(n)值最小的节点,作为当前要处理的节点,并把这个节点移到close_list中
对于当前节点附近的8个方格,剔除掉不可抵达的或者在close_list中的,作如下操作:
把不在open_list的加入open_list,并把当前节点设为他们的父节点,计算f(n),g(n),h(n)
如果他在open_list,检查这条路径:
如果路径更好,把节点的父节点设为当前节点,重新计算f(n),g(n),h(n)
如果路径不是更好,则不做处理
判断终止条件:
如果终点加入了open_list,则找到路径,从终点不断找父节点回到终点
补充:
1.在刚开始,open_list中只有起点,所以起点也就是要处理的节点
2.计算要累加,表示起点到当前节点的代价和
3.检查路径是为了找出更好的路径,检查的依据是,值越小路径越好。
举个例子就是从中心点A走到B然后再走到C,对比直接从A斜走到C
如果你觉得前者路径更好,则需要把C的父节点设为B,并重新计算它的和值
如果你觉得后者路径更好,则不需要做任何操作,因为C的父节点本来就是中心点A
代码实现
为了验证算法,我用符号简单搭了个二维地图,即省去调试图形化界面的时间,看起来也比较简便
import random
import operator
from math import sqrt
class Node:
def __init__(self, x, y):
self.display = 'o'
self.father_node = None
self.x = x
self.y = y
self.fn = 0
self.gn = 0
self.hn = 0
class MyMap:
def __init__(self):
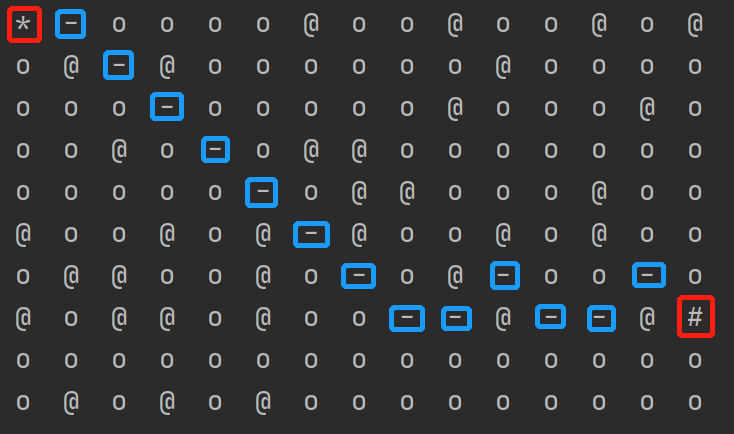
# o 表示可走位置 * 表示起点 # 表示终点 @表示障碍物
self.map_size = (10, 15) # 高 宽
self.game_map = [[Node(y, x) for x in range(self.map_size[1])] for y in range(self.map_size[0])]
# 生成起点和终点 保证起点终点离得有半个地图远
self.start_point = (0, 0) # 行 列
self.end_point = (0, 0)
self.end_point = self.get_random_point(
(int(self.map_size[0] / 2), int(self.map_size[1] / 2)),
self.map_size)
self.set_object_to_map(self.start_point, "*")
self.set_object_to_map(self.end_point, "#")
# 生成障碍物
self.obstacle = []
for _ in range(40):
obstacle_point = self.get_random_point((0, 0), self.map_size)
if not operator.eq(obstacle_point, self.start_point):
if not operator.eq(obstacle_point, self.end_point):
self.obstacle.append(obstacle_point)
self.set_object_to_map(obstacle_point, "@")
@staticmethod
def get_random_point(bottom_left, top_right):
return random.randint(bottom_left[0], top_right[0] - 1), \
random.randint(bottom_left[1], top_right[1] - 1)
def set_object_to_map(self, point, obj):
self.game_map[point[0]][point[1]].display = obj
def __repr__(self):
display = ''
for i in range(self.map_size[0]):
for j in range(self.map_size[1]):
display += self.game_map[i][j].display + ' '
display += '\n'
return display
def calc_manhattan_distance(start_point, end_point):
return abs(start_point[0] - end_point[0]) + abs(start_point[1] - end_point[1])
def calc_diagonal_distance(start_point, end_point):
x_abs = abs(start_point[0] - end_point[0])
y_abs = abs(start_point[1] - end_point[1])
return x_abs + y_abs + (sqrt(2) - 2) * min(x_abs, y_abs)
def calc_euclidean_distance(start_point, end_point):
return sqrt((start_point[0] - end_point[0]) ** 2 + (start_point[1] - end_point[1]) ** 2)
def main():
my_map = MyMap()
open_list = []
close_list = []
go_straight_cost = 10 # 直走成本
go_diagonally_cost = 14 # 斜走成本 sqrt(2)
one_step_cost = 10 # 走一步的成本
# 将起点加入open_list
open_list.append(my_map.game_map[my_map.start_point[0]][my_map.start_point[1]])
while True:
if len(open_list) <= 0:
print("没找到路径!\n")
break
# 根据fn排序选出当前节点
open_list = sorted(open_list, key=lambda x: x.fn)
now_node = open_list[0]
# 如果选到终点就退出
if operator.eq((now_node.x, now_node.y), my_map.end_point):
node = now_node
# 不断取父节点 原点的父节点是None
while True:
node = node.father_node
if node:
if not operator.eq((node.x, node.y), my_map.start_point): # 避免把原点覆盖
my_map.game_map[node.x][node.y].display = '-'
else:
break
break
# 把当前节点从open_list移出到close_list
for i, node in enumerate(open_list):
if operator.eq((now_node.x, now_node.y), (node.x, node.y)):
open_list.remove(open_list[i])
break
close_list.append(now_node)
# 提取点位置 方便判断
open_list_point = list(map(lambda m: (m.x, m.y), open_list))
close_list_point = list(map(lambda m: (m.x, m.y), close_list))
# 当前节点附近的八个位置
for i in range(now_node.x - 1, now_node.x + 2):
for j in range(now_node.y - 1, now_node.y + 2):
if not operator.eq((now_node.x, now_node.y), (i, j)):
# 越界检查
if my_map.map_size[0] > i >= 0 and my_map.map_size[1] > j >= 0:
# 如果不是障碍物 也不在close_list中
if (i, j) not in my_map.obstacle and (i, j) not in close_list_point:
# 如果不在open_list中
if (i, j) not in open_list_point:
# 加入open_list并设置父节点
open_list.append(my_map.game_map[i][j])
my_map.game_map[i][j].father_node = now_node
# 计算gn
if i == now_node.x or j == now_node.y:
my_map.game_map[i][j].gn = go_straight_cost # 直走
else:
my_map.game_map[i][j].gn = go_diagonally_cost # 斜走
last_node = now_node.father_node
if last_node:
my_map.game_map[i][j].gn += last_node.gn
# 计算hn
my_map.game_map[i][j].hn = \
one_step_cost * calc_diagonal_distance((i, j), my_map.end_point)
my_map.game_map[i][j].fn = \
my_map.game_map[i][j].gn + \
my_map.game_map[i][j].hn
# 如果在open_list中
else:
# 计算当前路径gn
if i == now_node.x or j == now_node.y:
my_map.game_map[i][j].gn = go_straight_cost
else:
my_map.game_map[i][j].gn = go_diagonally_cost
last_node = now_node.father_node
my_map.game_map[i][j].gn += last_node.gn
now_path_gn = my_map.game_map[i][j].gn + now_node.gn
# 计算新路径gn
if i == last_node.x or j == last_node.y:
new_path_gn = go_straight_cost
else:
new_path_gn = go_diagonally_cost
new_path_gn += last_node.gn
# 判断是否更改指向和更新数据
if new_path_gn > now_path_gn:
my_map.game_map[i][j].father_node = now_node
my_map.game_map[i][j].gn = now_path_gn
my_map.game_map[i][j].fn = \
my_map.game_map[i][j].gn + \
my_map.game_map[i][j].hn
print(my_map)
if __name__ == "__main__":
main()
效果如下:
参考:https://zhuanlan.zhihu.com/p/54510444
启发函数改进
,
记为结点走到目标结点的步数,则的作用如下:
如果,一定能找到最优路径
如果,一定能找到最优路径,越小,拓展节点越多,时间越长
如果,一定能找到最优路径,且没有拓展无关节点,时间最短
如果,不一定能找到最优路径,但拓展节点少,时间短
动态加权
开始时较大,到达目标点附近重要,拓展节点少,乘以较大系数
接近终点时较小,找到最优路径重要,拓展节点多,乘以较小系数
可以采用根号动态加权,即
内积
计算当前结点到目标节点向量与起点到目标节点向量的内积cross,
内积越大,向量相似度越高,越大